종합건설기업 '오바야시구미'와 공동 연구
일본 도쿄대 연구진은 종합건설기업인 오바야시구미(大林組)와 공동으로 자율 4족 보행로봇과 UAV(무인비행기)를 이용해 터널 단면에 대한 3차원 계측 실증실험을 실시했다고 14일 밝혔다.
이번 실증 실험은 국토교통성 ‘건설 현장의 생산성을 비약적으로 향상시키기 위한 혁신적 기술의 도입·활용에 관한 프로젝트’의 일환으로 후쿠시마 로봇 테스트 필드에서 이뤄졌다. 연구팀은 이번 실증 실험을 통해 복수의 단면 계측을 연속적으로, 그리고 효율적으로 실시할 수 있다는 것을 확인했다고 밝혔다.
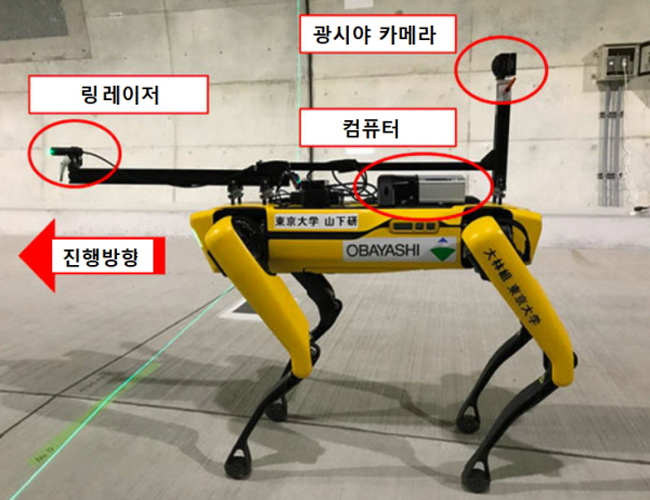
도쿄대 대학원 공학계 연구과와 오바야시구미가 공동 개발한 ‘광절단법(光切断法)을 이용한 산악 터널 단면 계측 시스템’은 1단면의 계측 작업 인원을 약 4분의 1로 줄이고, 계측 시간을 약 120분의 1로 줄일 수 있다. 기존의 기술은 고정된 삼각대 위에 링 레이저와 광시야 카메라를 설치해 사…